








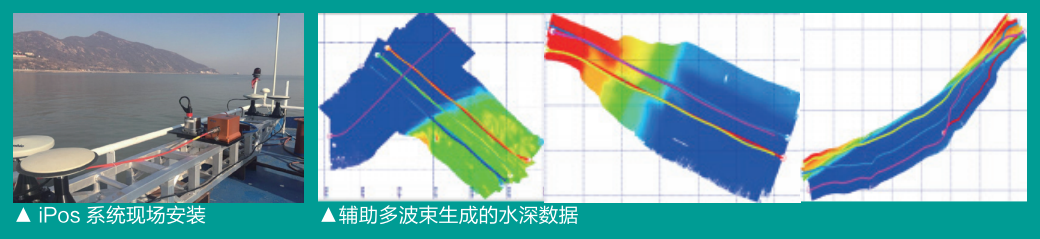
连云港港口,海底地形复杂,集装箱码头物流繁忙,吊机、集装箱林立,GNSS 受遮挡的区域较多。此外,外海风浪较大,测量船的姿态变化复杂,涌浪起伏变化导致多波束系统在实际作业中的精度和效率都面临巨大的挑战。因此多波束测深系统需要高精度的外接辅助传感器来修正测量的数据。
在多波束测深系统中,一般都配有各种辅助设备,包括定位设备、姿态传感器、道向传感器以及声速剖面仪等;高精度的多波束测量,必须搭配高精度的组合惯导系统。
使用中海达 iPos MS11高精度惯性组合导航系统完成整个海港的测绘工作。
所用设备:iPos MS11高精度惯性组合导航系统
作业地点:连云港港口及航道
作业过程
选择iPOS MS11系统作为多波束系统的辅助传感器,一天之内,完成整个海港三个主要区域的测绘工作。并使用国外同类产品做对比,数据一致性超过99%。实践证明, iPOS MS11可满足海洋测绘的精度需求,性能可靠稳定,是多波束测深系统的绝佳辅助传感器。
具体步骤如下:
1.设备安装:将两个天线分别安装在船顶开阔区域,尽量将惯性测量单元( IMU )安装在船体的中心位置,并布置好线缆;
2设备调试:开机后,组合惯导软件中输入GNSS 天线之间的距离、GNSS 天线相对于IMU参考点的偏距,确认差分信号源、接口、波特率等,确认设备可正常输出数据;
3.设备对接:确认惯导系统输出的数据,多波束系统可以正确接收,收发正常;
4.设备作业:确认好所有安装、调试工作后,即可开始作业,在作业过程中需要观察惯导系统的数据输出是否正常,并做记录。
随着我国光纤惯导技术和GNSS卫星导航技术的不断发展,将两种优势互补的导航系统有机地结合起来,形成高精度、全自由度的定位定姿数据输出,可以广泛地应用在机载Lidar、海洋测绘、移动测量、无人船、无人车等领域。中海达自主研发的iPos MS11组合导航产品,具有完全的自主产权,并聚焦海洋测绘应用,是高精度多波束测深系统的天然辅助传感器。同时系统具有非常强的扩展性,接口丰富,可以兼容多种需要高精度定位定姿数据的设备。
该解决方案的优势体现在:
1.产品内置光纤陀螺,加速度计及GNSS高精度板卡,并通过算法深度融合,生成高精度高频率的全自由度数据——姿态、航向、升沉、位置和速度;
2.能够提供精确的位置参考和运动补偿。






 顶部
顶部